AUTO TARGET DETECTION / COORDINATE SYSTEM TRANSFORMATION
KEEP IT SIMPLE
The automobile industry is challenged with finding an easy, reliable, fast and cost-effective method to analyze the outcomes of crash tests. Two companies have now joined forces to provide an innovative solution.
Mantis Vision, a company well known for its fast, accurate and robust 3D handheld scanners, is the provider of the hardware and the general 3D software.
TEC Competence is a start-up focusing on sensor applications, product development and software applications.
This unique solution has integrated the TEC application software directly into the Mantis scanning software, enabling the entire process – from scanning through the end result – to be streamlined within the Mantis Echo software. No third-party software or time-consuming data transfers or data format changes are required. The entire process is executed through a single workflow, which is easy to learn and simple to handle.
The solution can be applied directly at the crash site. A comparison between the simulated setting (e.g. dummy position) can be carried out just before the crash.
USERS AND RESULTS
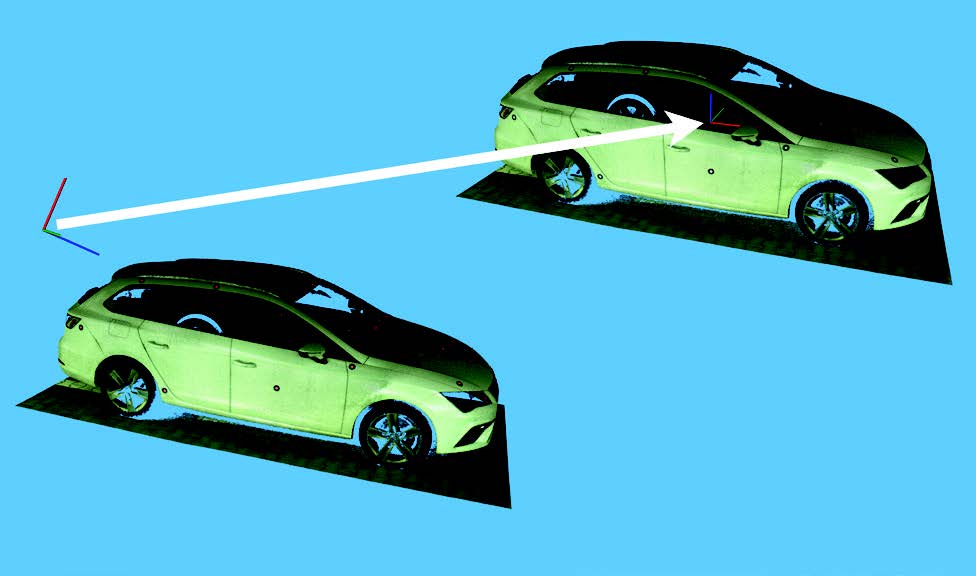
The application can be used by the car manufacturer as well as by a third-party crash lab. The main task of the application is to deliver the 3D point cloud of the crash car in the car/simulation coordinate system for further evaluation.
The car manufacturer, which already has the vehicle in its simulation coordinate system, provides a OBC/CSV file with the target coordinates.
- Scan of the car at the crash site. The targets are automatically detected from within the OBC/CSV file and transferred from the scan coordinate system to the simulation coordinate system
- Check/compare setup with simulation prior to crash
- Perform crash test
- Scan again and change coordinate system
- Deliver the data in the simulation coordinate system for further evaluation
For third-party crash labs that do not have the OBC/CSV file with the target coordinates, the application can be used in two ways:
Alignment using 2D markers. The car is scanned before the crash; the targets are automatically detected and the coordinates are stored. After the crash, the targets will be detected again and the coordinates will be replaced by the target coordinates taken before the crash.
The second option is for the targets to be placed on known positions on the car, representing the car coordinate system. And enabling the same process to be performed. The end result is that the 3D point cloud can be delivered in the car coordinate system for further evaluation.